

Stabilität ist eine der wichtigsten Leistungsanforderungen an ein ferngesteuertes Hydrauliksystem für einen Bagger.
Einleitung
Stabilität ist eine der wichtigsten Leistungsanforderungen an das Hydrauliksystem eines ferngesteuerten Baggers. Im Gegensatz zu herkömmlichen Baggern, die direkt von einem Bediener an Bord gesteuert werden, sind ferngesteuerte Maschinen vollständig auf die elektrohydraulische Kraftübertragung und Steuerungslogik angewiesen, um Befehlssignale in physische Bewegung umzusetzen. Jede Instabilität im Hydrauliksystem wirkt sich unmittelbar auf das Verhalten der Maschine aus.
Instabile Bewegungen verringern nicht nur die Arbeitsgenauigkeit, sondern erhöhen auch die Sicherheitsrisiken, insbesondere in Gefahrenbereichen, in denen ferngesteuerte Bagger am häufigsten eingesetzt werden. In der Praxis hängen Stabilitätsprobleme bei ferngesteuerten Baggern eng mit dem Verhalten des Hydrauliksystems zusammen.
Die Behebung dieser Probleme erfordert eine Systemanalyse und gezielte hydraulische Optimierung anstelle isolierter Parameteranpassungen.
Warum Stabilität bei ferngesteuerten Baggern schwieriger ist
Fehlende direkte menschliche Kompensation
Bei herkömmlichen Baggern kompensieren Bediener unbewusst Systemunvollkommenheiten, indem sie die Joystick-Eingabe in Echtzeit anpassen. Bei ferngesteuerten Baggern ist dieser natürliche menschliche Feedback-Mechanismus abgeschwächt oder verzögert, wodurch die inhärente Stabilität des Hydrauliksystems deutlich an Bedeutung gewinnt.
Selbst geringfügige nichtlineare Effekte im Hydrauliksystem können Folgendes verursachen: Ruckartige Start-Stopp-Bewegungen; Schwingungen bei niedrigen Geschwindigkeiten; Inkonsistente Aktuatorreaktion bei wechselnder Last. Diese Effekte werden durch Signalverzögerungen und eingeschränktes visuelles Feedback verstärkt.
Typische Stabilitätsprobleme bei ferngesteuerten Baggern
Instabilität bei niedrigen Geschwindigkeiten
Eines der häufigsten Probleme ist die instabile Bewegung bei niedrigen Geschwindigkeiten oder Feinpositionierungsaufgaben.
Hydraulische Aktuatoren können bei kleinen Steuereingaben zögern, ruckartig reagieren oder oszillieren.Dieses Verhalten wird hauptsächlich durch Totzonen von Proportionalventilen, nichtlineare Strömungseigenschaften bei geringen Ventilöffnungen und eine unzureichende Auflösung der Druckrückkopplungssignale verursacht, was die Regelbarkeit bei niedrigen Drehzahlen beeinträchtigt.
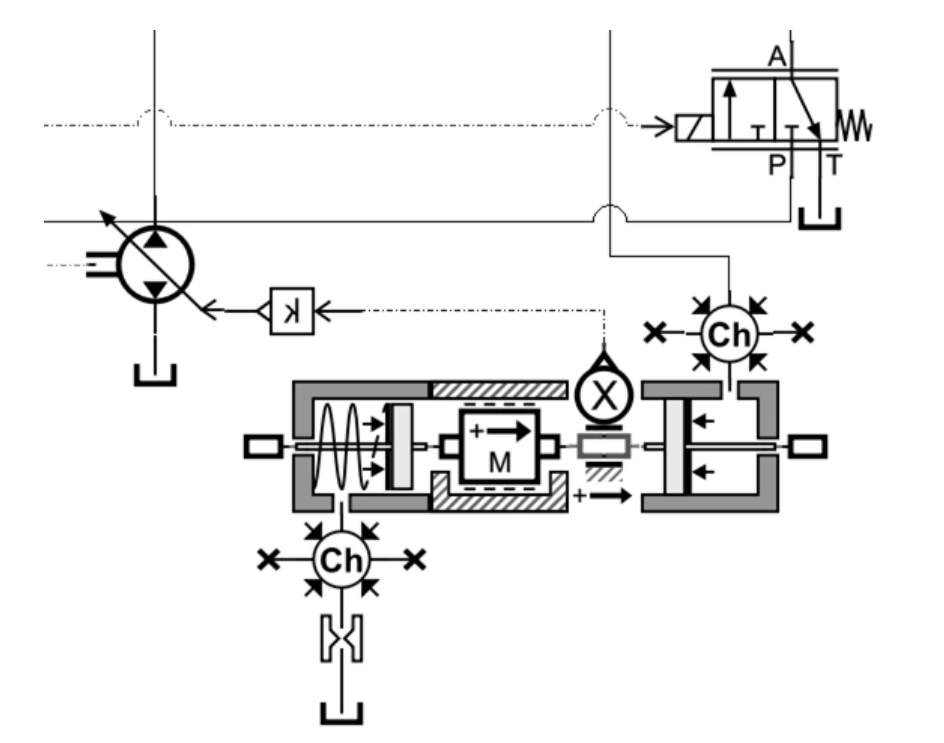
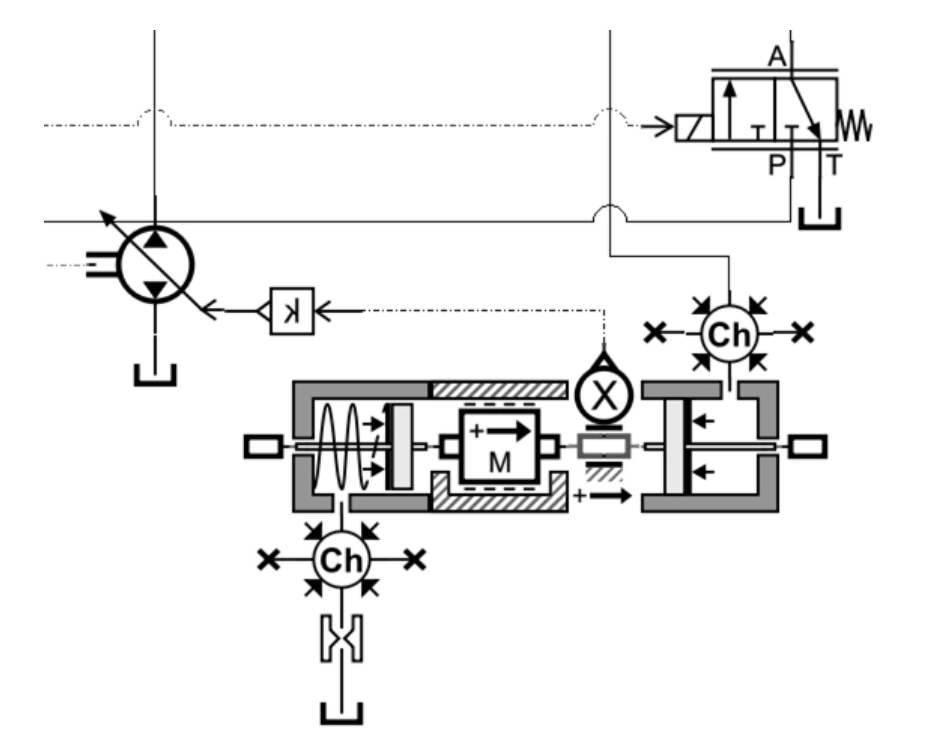
Simulationsmodell der Verstellpumpe Pumpe
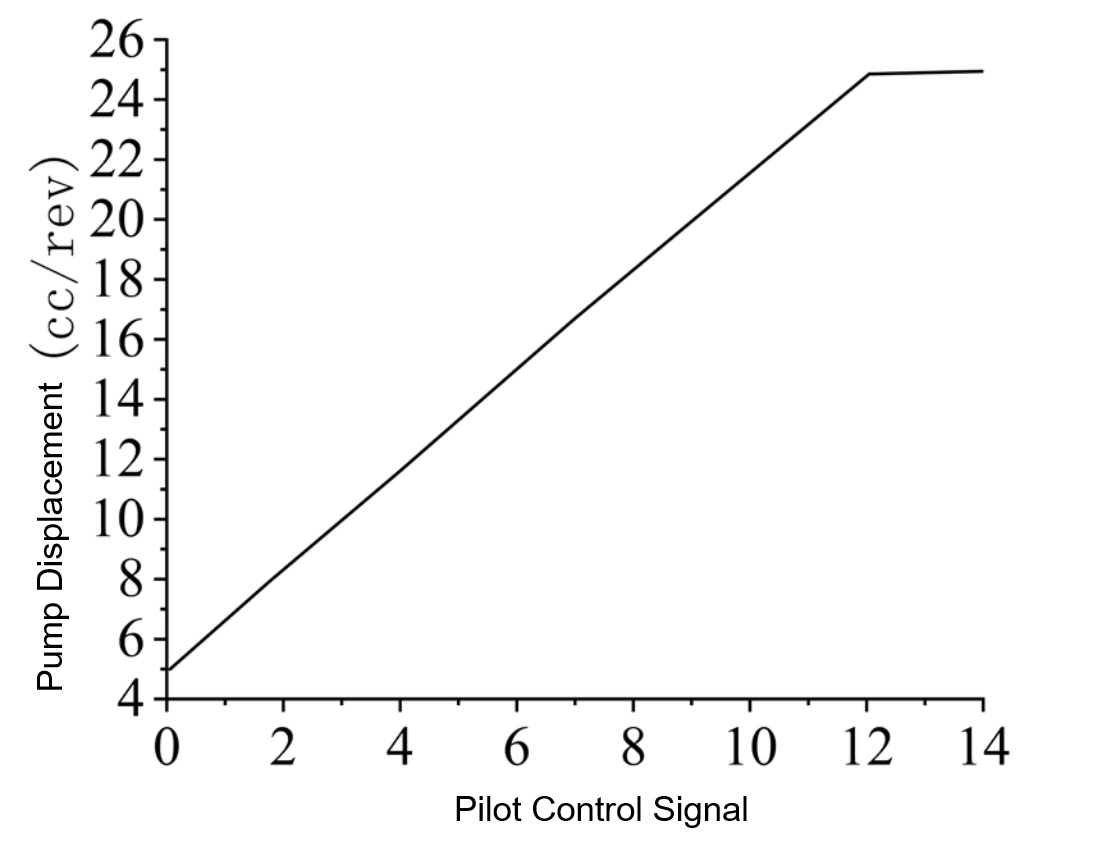
Kennlinie der Durchflussregelung der Verstellpumpe
Schwingung unter variablen Lastbedingungen
Der Aushubwiderstand ändert sich während der Aushubarbeiten kontinuierlich. Ohne entsprechende Kompensation können diese Lastschwankungen Druckschwankungen verursachen, die zu Schwingungen oder Überschwingen der Zylinderbewegung führen.
Ferngesteuerte Bagger reagieren besonders empfindlich auf dieses Problem, da Laständerungen nicht unmittelbar durch direkte Rückmeldung des Bedieners kompensiert werden können, was höhere Anforderungen an die Systemstabilität stellt.
Verzögerte Reaktion und Überschwingen
Signalübertragungsverzögerungen, die Fernsteuerungssystemen inhärent sind, können eine Phasenverzögerung zwischen Befehlseingabe und Aktorreaktion verursachen.
In Kombination mit hydraulischer Nichtlinearität führt diese Verzögerung häufig zu Überschwingen oder wiederholten Korrekturzyklen, was die Betriebseffizienz verringert.
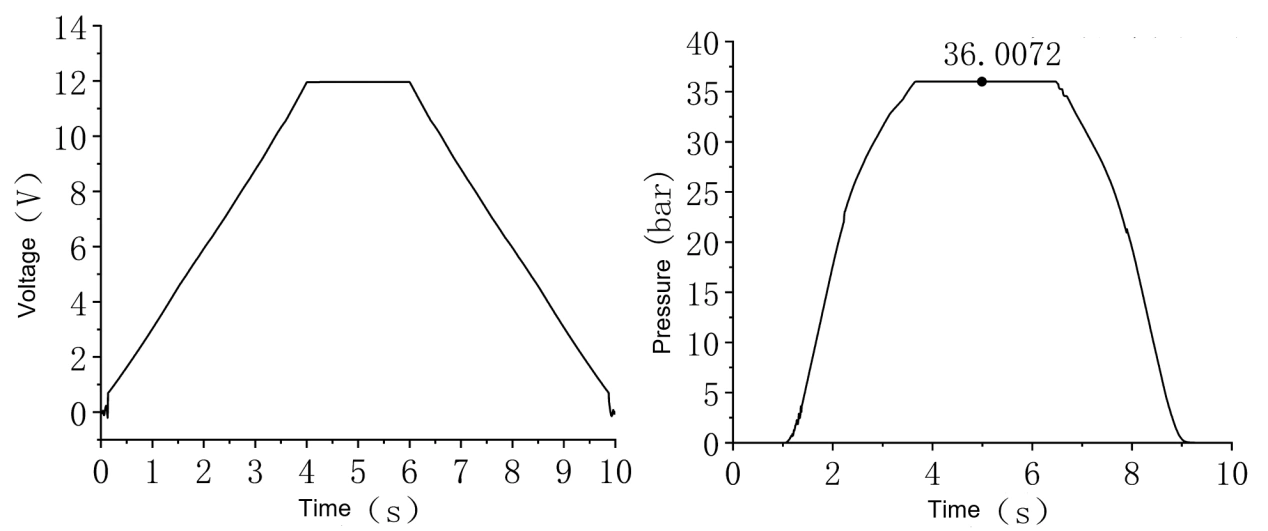
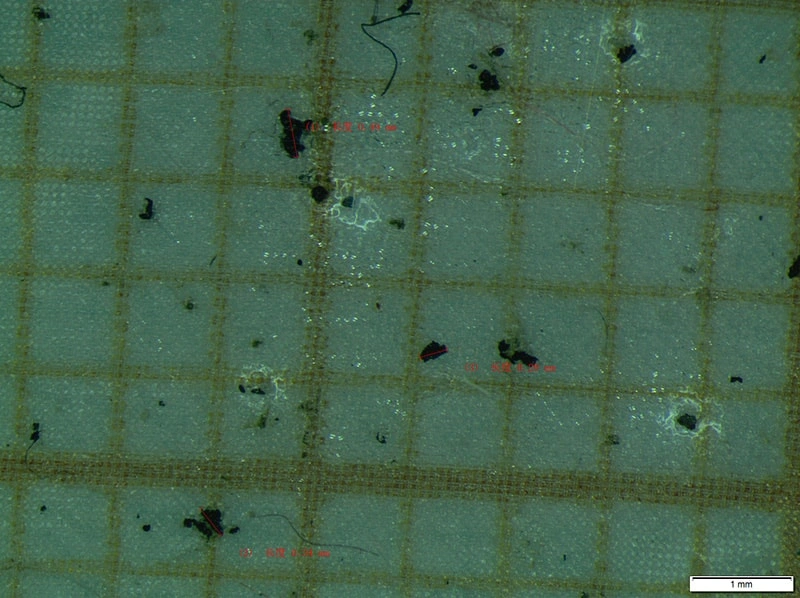
Simulationsergebnisse eines elektromagnetischen Proportional-Druckbegrenzungsventils
Ursachen im Hydrauliksystem Ventil-Nichtlinearitäten und Totzonen
Proportional-Wegeventile sind wesentliche Komponenten in einem ferngesteuerten Bagger-Hydrauliksystem. Totzonen und Hysterese sind jedoch unvermeidbare physikalische Eigenschaften. Ohne Kompensation stören diese Nichtlinearitäten die Beziehung zwischen Steuereingang und Hydraulikausgang, insbesondere bei niedrigen Drehzahlen. Durchfluss-Druck-Kopplungseffekte Der Hydraulikdurchfluss wird nicht nur durch die Ventilöffnung, sondern auch durch die Druckdifferenz am Ventil beeinflusst. Bei Änderungen des Lastdrucks kann dasselbe Steuersignal zu unterschiedlichen Aktuatorgeschwindigkeiten führen und die Vorhersagbarkeit des Systems beeinträchtigen.
Kopplung mehrerer Aktuatoren
Bagger betreiben häufig mehrere Hydraulikaktuatoren gleichzeitig. Druckinteraktionen zwischen den Kreisläufen können Kopplungseffekte hervorrufen, die die Gesamtstabilität des Systems beeinträchtigen, wenn sie nicht ordnungsgemäß gehandhabt werden.
Lösungen auf Systemebene für die Stabilitätsverbesserung im Hydrauliksystem
Nichtlineare Kompensation als Kernstrategie
Die nichtlineare Kompensation behebt die grundlegende Diskrepanz zwischen Steuereingang und Hydraulikausgang.
Durch die Umformung von Steuersignalen zur Kompensation von Totzonen und nichtlinearem Strömungsverhalten kann die Stabilität über den gesamten Betriebsbereich deutlich verbessert werden.Dieser Ansatz ist besonders effektiv für ferngesteuerte Bagger, bei denen ein vorhersagbares Verhalten unerlässlich ist.
Integrierte Rückkopplungsregelung
Zur Verbesserung der Stabilität ist mehr als eine Kompensation im offenen Regelkreis erforderlich. Durch die Integration von Weg- und Druckrückmeldung in das Regelsystem können Abweichungen, die durch Laständerungen oder externe Störungen verursacht werden, in Echtzeit korrigiert werden.
Eine optimierte Rückkopplungsstruktur ermöglicht es dem Hydrauliksystem, auch bei intermittierenden oder verzögerten Fernbefehlen eine stabile Bewegung beizubehalten.
Systemparameteroptimierung
Hydrauliksystemparameter wie Ventilverstärkung, Dämpfungskoeffizienten und Regelbandbreite müssen speziell für den Fernbetrieb optimiert werden.
Parameteroptimierungen, die für konventionelle Bagger funktionieren, sind möglicherweise nicht für ferngesteuerte Plattformen geeignet.Simulationsbasierte Optimierung spielt eine Schlüsselrolle bei der Identifizierung stabiler Parameterbereiche ohne umfangreiche physische Tests.
Validierung durch Simulation und Tests
Simulationsergebnisse zeigen, dass eine Optimierung auf Systemebene Stabilitätsprobleme bei ferngesteuerten Baggern unter repräsentativen Betriebsbedingungen deutlich reduzieren kann.
Zu den wichtigsten Verbesserungen gehören: Reduzierte Schwingungsamplitude; Schnellere Einschwingzeit; Verbesserte Nachführgenauigkeit.
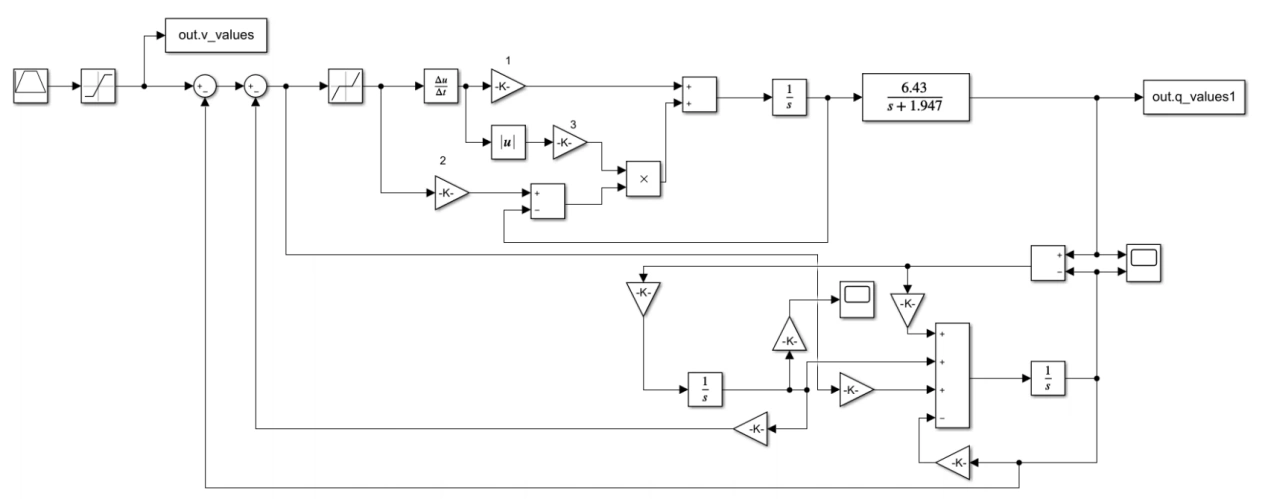
Controller Simulation Model
Praktische Vorteile für ferngesteuerte Baggeranwendungen
Sicherer Betrieb in Gefahrenbereichen
Eine stabile Hydrauliksteuerung minimiert unerwartete Bewegungen. Dies ist entscheidend, wenn ferngesteuerte Bagger in Abbruchzonen, beengten Räumen oder Umgebungen mit eingeschränktem Zugang für Personen eingesetzt werden.
Verbesserte Präzision für Feinarbeiten
Die erhöhte Stabilität ermöglicht es ferngesteuerten Baggern, Präzisionsarbeiten wie Planieren, Grabenfertigen und Materialplatzieren mit höherer Genauigkeit durchzuführen.
Vom Engineering zur Fertigung
Die Umsetzung von Lösungen zur hydraulischen Stabilität in serienreife Systeme erfordert eine enge Verzahnung von Steuerungsentwicklung und Fertigungsprozessen.
Aus technischer und fertigungstechnischer Sicht gewährleistet die Implementierung von Hydraulikoptimierungsstrategien auf Systemebene Robustheit, Skalierbarkeit und Eignung für den Langzeitbetrieb von ferngesteuerten Baggerplattformen. Durch die Integration stabilitätsorientierter Konstruktionsprinzipien in die Hydrauliksysteme von ferngesteuerten Baggern können Hersteller Geräte liefern, die sowohl technische als auch betriebliche Anforderungen erfüllen. Stabilitätsprobleme bei ferngesteuerten Baggern entstehen durch Nichtlinearitäten im Hydrauliksystem, Laständerungen und Signalverzögerungen. Die Bewältigung dieser Herausforderungen erfordert einen Systemansatz, der nichtlineare Kompensation, Regelung und Parameteroptimierung kombiniert. Ein gut konzipiertes Hydrauliksystem für ferngesteuerte Bagger verbessert nicht nur die Betriebssicherheit, sondern erweitert auch die praktischen Anwendungsmöglichkeiten der ferngesteuerten Aushubtechnik. Stabilität ist nicht länger eine Nebensache… sie ist eine Kernanforderung für moderne intelligente Baggersysteme.